






|

| Mars Pathfinder Images |
|---|
 Panoramic Views of the Landing site from Sagan Memorial Station
Panoramic Views of the Landing site from Sagan Memorial Station
Each of these panoramic views is a controlled mosaic of approximately 300
IMP images covering 360 degrees of azimuth and elevations from approximately
4 degrees above the horizon to 45 degrees below it. Simultaneous adjustment
of orientations of all images has been performed to minimize discontinuities
between images. Mosaics have been highpass-filtered and contrast-enhanced to
improve discrimination of details without distorting relative colors overall.
TOP IMAGE: Enhanced true-color image created from the 'Gallary Pan' sequence, acquired on sols 8-10 so that local solar time increases nearly continuously from about 10:00 at the right edge to about 12:00 at the left. Mosaics of images obtained by the right camera through 670 nm, 530 nm, and 440 nm filters were used as red, green and blue channels. Grid ticks indicate azimuth clockwise from north in 30 degree increments and elevation in 15 degree increments.
BOTTOM IMAGE: Anaglyphic stereoimage created from the 'monster pan' sequence,
acquired in four sections between about 8:30 and 15:00 local solar time on
sol 3. Mosaics of images obtained through the 670 nm filter (left camera) and
530 and 440 nm filters (right camera) were used where available. At the top
and bottom, left- and right-camera 670 nm images were used. Part of the
northern horizon was not imaged because of the tilt of the lander. This image
may be viewed stereoscopically through glasses with a red filter for the left
eye and a cyan filter for the right eye.
(Courtesy USGS)
 Coordinate Map of Rocks at Pathfinder Landing Site
Coordinate Map of Rocks at Pathfinder Landing Site
Mars-local-level (LL frame) coordinate map of rocks counted at the
Mars Pathfinder landing site. Positions, apparent diameters (D),
and heights (H) were measured to the nearest centimeter in the
Marsmap virtual reality environment constructed from the "Monster
Pan".
(Courtesy USGS)
 Many Rovers
Many Rovers
Various images of the Sojourner rover shot by the Pathfinder cameras have been
composited into the Presidential Panorama. Since the camera's position was
consistent, it is thus possible to see these images of the rover in the context
of the entire landscape. This provides a visual scale for understanding the
sizes and distances of rocks surrounding the lander as well as a record of the
travels of the rover.
(Courtesy Carol Stoker/NASA AMES)
 Sunset over Twin Peaks
Sunset over Twin Peaks
This image was taken by the Imager for Mars Pathfinder (IMP) about one
minute after sunset on Mars on Sol 21. The prominent hills dubbed "Twin
Peaks" form a dark silhouette at the horizon, while the setting sun casts
a pink glow over the darkening sky. The image was taken as part of a
twilight study which indicates how the brightness of the sky fades
with time after sunset. Scientists found that the sky stays bright for
up to two hours after sunset, indicating that Martian dust extends
very high into the atmosphere.
(Courtesy University of Arizona)
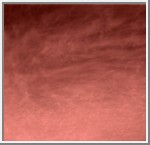
 Clouds Over the Eastern Martian Horizon
Clouds Over the Eastern Martian Horizon
Pink stratus clouds are coming from the northeast at about 15 miles
per hour (6.7 meters/second) at an approximate height of ten miles
(16 kilometers) above the surface. The clouds consist of water ice
condensed on reddish dust particles suspended in the atmosphere.
Clouds on Mars are sometimes localized and can sometimes cover
entire regions, but have not yet been observed to cover the entire
planet. The image was taken by the Imager for Mars Pathfinder (IMP)
on Sol 16 about forty minutes before sunrise showing areas of the
eastern Martian horizon.
(Courtesy University of Arizona)
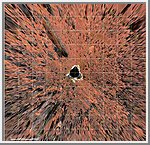
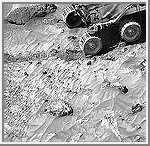
 Wind Effects on Martian Soil
Wind Effects on Martian Soil
This false-color combination image highlights details of wind effects on
the Martian soil at the Pathfinder landing site. Red and blue filter
images have been combined to enhance brightness contrasts among several
soil units. Martian winds have distributed these lighter and darker fine
materials in complex patterns around the rocks in the scene (blue). For
scale, the rock at right center is 16 centimeters (6.3 inches) long. This
scene is one of several that will be monitored weekly for changes caused
by wind activity.
(Courtesy University of Arizona)
Sojourner at Mermaid Dune
This is an image of the rover Sojourner at the feature called
Mermaid Dune at the MPF landing site. Mermaid is thought to be a
low, transverse dune ridge, with its long (approximately 2 meter)
axis transverse to the wind, which is thought to come from the
lower left of the image and blow toward the upper right. The
rover is facing to the lower left, the "upwind" direction. The
rover's middle wheels are at the crestline of the small dune,
and the rear wheels are on the lee side of the feature. A soil
mechanics experiment was performed to dig into the dune and
examine the sediments exposed.
(Courtesy University of Arizona)
 Clouds over Mars!
Clouds over Mars!
This is the first color image ever taken from the surface of Mars
of an overcast sky. Featured are pink stratus clouds coming from
the northeast at about 15 miles per hour (6.7 meters/second) at an
approximate height of ten miles (16 kilometers) above the surface.
The clouds consist of water ice condensed on reddish dust particles
suspended in the atmosphere. Clouds on Mars are sometimes localized
and can sometimes cover entire regions, but have not yet been
observed to cover the entire planet. The image was taken about
an hour and forty minutes before sunrise by the Imager for Mars
Pathfinder (IMP) on Sol 16 at about ten degrees up from the
eastern Martian horizon.
(Courtesy University of Arizona)
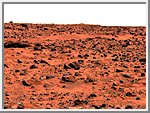 Roadrunner Flats
Roadrunner Flats
This enhanced color image of the Pathfinder landing site shows
the eastern horizon. The elongated, reddish, low contrast
region in the distance is "Roadrunner Flats". This image was
taken by the Imager for Mars Pathfinder (IMP).
(Courtesy USGS)
 Closeup of Mermaid Dune
Closeup of Mermaid Dune
This pair of images shows a broad view (upper image) and detailed
close-up view (lower image) of the disturbed surface near and on
Mermaid Dune. Seen slightly right of center in the upper image are
two diggings by the rover's wheel. The uppermost rut is in the
surface away from Mermaid and is considered to be typical of the
surface at the landing site. The closer rut represents the surface
at the base of Mermaid on the upwind side. The lower image is an
enlargement of the disturbed Mermaid sediments plus those of the
underlying substrate; that is, the ground upon which the dune lies.
Seen in the close-up are at least two types of sediment, one that
seems to be approximately 1.4 cm thick and forms piles with sides
sloping at approximately 35 degrees, and another at least 3 cm
deep composed of sediment that has a characteristic slope of 41
degrees when piled. It is apparent in the images that there is a
size range of sediment present in the rut, sediment that ranges
from a few millimeters in size down to below the resolution of the camera.
(Courtesy USGS)
 Overhead View of Pathfinder Landing Site
Overhead View of Pathfinder Landing Site
Planimetric (overhead view) map of the landing site, to a distance
of 20 meters from the spacecraft. North is at the top in this and
Plates 3-5. To produce this map, images were geometrically projected
onto an assumed mean surface representing the ground. Features above
the ground plane (primarily rocks) therefore appear displaced
radially outward; the amount of distortion increases systematically
with distance. The upper surfaces of the lander and rover also
appear enlarged and displaced because of their height. Primary grid
(white) is based on the Landing Site Cartographic (LSC) coordinate
system, defined with X eastward, Y north, and Z up, and origin
located at the mean ground surface immediately beneath the deployed
position of the IMP camera gimbal center. Secondary ticks (cyan) are
based on the Mars local level (LL) frame, which has X north, Y east,
Z down, with origin in the center of the lander baseplate. Rover
positions (including APXS measurements) are commonly reported in the
LL frame. Yellow grid shows polar coordinates based on the LSC
system. Cartographic image processing by U.S. Geological Survey.
(Courtesy USGS)
 Shark
Shark
This false color composite image from the Pathfinder lander shows
the rock "Shark" at upper right (Shark is about 0.69 m wide, 0.40
m high, and 6.4 m from the lander). The rock looks like a
conglomerate in Sojourner rover images, but only the large elements
of its surface textures can be seen here. This demonstrates the
usefulness of having a robot rover geologist able to examine rocks
up close.
(Courtesy USGS)
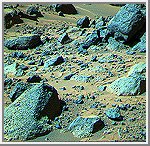
 Rock Garden
Rock Garden
This false color composite image of the Rock Garden shows the
rocks "Shark" and "Half Dome" at upper left and middle,
respectively. Between these two large rocks is a smaller rock
(about 0.20 m wide, 0.10m high, and 6.33 m from the Lander)
that was observed close- up with the Sojourner rover.
(Courtesy USGS)
 Cabbage Patch
Cabbage Patch
This Sojourner rover image of the Cabbage Patch shows small rounded
objects on the surface that are about 3-4 cm across. Some of these
are within excavations, which are about 0.5 cm wide. Several
questions arise about the pebbles: Why are they rounded? Where did
they come from? What do they mean?
Geologists use MULTIPLE WORKING HYPOTHESES when attempting to explain observations. Some hypotheses that could account for the pebbles are:
 Pebbles and Cobbles at Mars Pathfinder Site
Pebbles and Cobbles at Mars Pathfinder Site
 Pebbles, Cobbles, and Sockets
Pebbles, Cobbles, and Sockets
 Sockets and Pebbles
Sockets and Pebbles
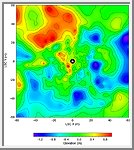 Topographic Map of Pathfinder Landing Site
Topographic Map of Pathfinder Landing Site
Copyright © 1997-2000 by Calvin J. Hamilton. All rights reserved. Privacy Statement.

 Mars
Mars